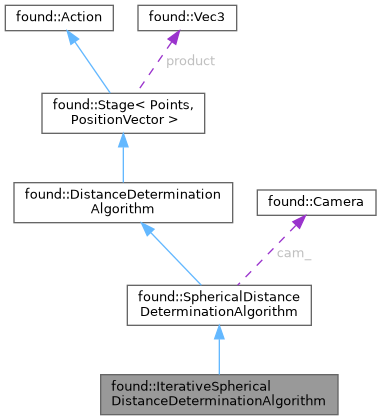
The IterativeSphericalDistanceDeterminationAlgorithm is a variation of the SphericalDistanceDeterminationAlgorithm algorithm in that it runs it repeatedly to use all the points given to it. More...
#include <distance.hpp>
Public Member Functions | |
| IterativeSphericalDistanceDeterminationAlgorithm (decimal radius, Camera &&cam, size_t minimumIterations, size_t maximumRefreshes, decimal distanceRatio, decimal discriminatorRatio, int pdfOrder, int radiusLossOrder) | |
| Creates a IterativeSphericalDistanceDeterminationAlgorithm. | |
| PositionVector | Run (const Points &p) override |
| Obtains the position of the planet relative to the camera. | |
 Public Member Functions inherited from found::SphericalDistanceDeterminationAlgorithm Public Member Functions inherited from found::SphericalDistanceDeterminationAlgorithm | |
| SphericalDistanceDeterminationAlgorithm (decimal radius, Camera &&cam) | |
| Creates a SphericalDeterminationAlgorithm, which deduces the Position vector of a sattelite from Earth by modeling Earth as a sphere. | |
| PositionVector | Run (const Points &p) override |
| Obtains the position of the planet relative to the camera. | |
| Public Member Functions inherited from found::FunctionStage< Points, PositionVector > | |
| FunctionStage ()=default | |
| Constructs a new Stage. | |
| virtual | ~FunctionStage ()=default |
| Destroys this. | |
| void | DoAction () override |
| Executes Run (with a stored input and storing the output) | |
| Points & | GetResource () |
| Returns the stored input of this. | |
| PositionVector *& | GetProduct () |
| Returns the stored output of this. | |
| Public Member Functions inherited from found::Stage< Input, Output > | |
| virtual Output | Run (Input input)=0 |
| Runs this stage. | |
Private Member Functions | |
| decimal | GenerateLoss (PositionVector &position, decimal targetDistanceSq, std::unique_ptr< Vec3[]> &projectedPoints, size_t size) |
| Generates a loss on a position vector. | |
| PositionVector | ShuffledCall (std::unique_ptr< Vec3[]> &source, size_t n, std::unique_ptr< uint64_t[]> &logits) |
| Calls SphericalDistanceDeterminationAlgorithm::Run with randomized triplets of indicies from source. | |
| uint64_t | Pow (uint64_t base, uint64_t power) |
| Performs exponentiation for uint64_t. | |
Additional Inherited Members | |
| Protected Member Functions inherited from found::SphericalDistanceDeterminationAlgorithm | |
| Vec3 | getCenter (const Vec3 &a, const Vec3 &b, const Vec3 &c) |
| Returns the center of earth as a 3d Vector. | |
| PositionVector | Run (const Vec3 &a, const Vec3 &b, const Vec3 &c) |
| Returns the position of the planet relative to the camera. | |
| Protected Attributes inherited from found::SphericalDistanceDeterminationAlgorithm | |
| Camera | cam_ |
| cam_ field instance describes the camera settings used for the photo taken | |
| decimal | radius_ |
| radius_ field instance describes the defined radius of earth. | |
| Vec3 | center_ |
| Calculated center vector. | |
| decimal | r_ |
| Calculated radius. | |
| Protected Attributes inherited from found::FunctionStage< Points, PositionVector > | |
| Points | resource |
| The stored input for this. | |
| PositionVector * | product |
| The pointer to the stored output for this. | |
Detailed Description
The IterativeSphericalDistanceDeterminationAlgorithm is a variation of the SphericalDistanceDeterminationAlgorithm algorithm in that it runs it repeatedly to use all the points given to it.
It uses
- selective randomization of Points, using a even polynomial distributions to prioritize points farther from selected points within triplets
- loss criterion to evaluate each guess
- softmax activation to figure out the plausibility of each guess
- Note
- Testing data on
test/common/assets/example_earth1.png:
SDDA -> (1.0456e+07, -67903.8, -972.935) m
- Distance Error: 0.752384891562%
- Angle Error: 1339.6805912772 arcseconds
- Execution Time: < 1 sec
ISDDA(100000, 0.8, INF, Quadratic Radius Loss AND Randomization) -> (1.0384e+07, -12571.3, -1057.05) m
- Distance Error: 0.0565676042517%
- Angle Error: 250.59497104116 arcseconds
- Execution Time: 11 sec
ISDDA(100000, 0.8, INF, Quartic Radius Loss OR Randomization) -> (1.03781e+07, -11536.7, -927.331) m
- Distance Error: 0.000294332681557%
- Angle Error: 230.031583013 arcseconds
- Execution Time: 11 sec
In optimized mode (-O3), all algorithms are less than 1 second.
Constructor & Destructor Documentation
◆ IterativeSphericalDistanceDeterminationAlgorithm()
| found::IterativeSphericalDistanceDeterminationAlgorithm::IterativeSphericalDistanceDeterminationAlgorithm | ( | decimal | radius, |
| Camera && | cam, | ||
| size_t | minimumIterations, | ||
| size_t | maximumRefreshes, | ||
| decimal | distanceRatio, | ||
| decimal | discriminatorRatio, | ||
| int | pdfOrder, | ||
| int | radiusLossOrder | ||
| ) |
Creates a IterativeSphericalDistanceDeterminationAlgorithm.
- Parameters
-
radius The radius of Earth cam The camera used to capture the picture of Earth minimumIterations The minimum number of iterations to perform maximumRefreshes The maximum number of times to refresh the reference position distanceRatio The maximum distance error between the evaluated and reference positions to be considered "the same" distance discriminatorRatio The maximum ratio between the evaluated and reference loss to accept for data pdfOrder The Shuffle Randomization Distribution Order radiusLossOrder The Loss Radius Error Order
- Note
- Setting distanceRatio to DECIMAL_INF will exclude distance loss from loss calculations
- Setting discriminatorRatio to DECIMAL_INF will include all generated points in the final point
- Postcondition
- If pdfOrder or radiusLossOrder less than 2, they will be made 2. Then if they are odd, they will be incremented
Member Function Documentation
◆ GenerateLoss()
|
private |
Generates a loss on a position vector.
- Parameters
-
position The vector to evaluate targetDistanceSq The target distance squared of the position projectedPoints The projected points to evaluate against size The size of the projected points
- Returns
- The loss of position
- Precondition
- targetRadiusSq is not the true radius, but rather the distance obtained between the radius vector and a circle point when projected onto the unit sphere (normalized). It still functions the same way.
◆ Pow()
|
inlineprivate |
Performs exponentiation for uint64_t.
- Parameters
-
base The base power The power
- Returns
- base ^ power
◆ Run()
|
override |
Obtains the position of the planet relative to the camera.
- Parameters
-
p The points on the edge of Earth (in the image taken by the camera given to this)
- Returns
- PositionVector The position vector of the Earth relative to the camera
- Precondition
- p must refer to points taken by the camera that was passed to this
- p is radially sorted, i.e. if we define the centroid of the points as P, for any three consecutive points A B and C, angle APB is less than angle APC
- Postcondition
- If p.size() < 3, then the result is exactly the zero vector
- Note
- If minimumIterations (from constructor) is less than the size of p, then it will increase the number of iterations to cover all of p
◆ ShuffledCall()
|
private |
Calls SphericalDistanceDeterminationAlgorithm::Run with randomized triplets of indicies from source.
- Parameters
-
source The source of Vec3 objects n The number of elements in source logits The logits array to use for randomization
- Returns
- The resulting PositionVector from the 3 randomized points
- Precondition
- Any precondition from this->Run
- source.size() >= 3
- source[i] is normalized for all i in [0, source.size())
- Note
- This algorithm uses a even polynomial distribution to prioritize points far away from a given index. We like that because it helps deal with noise. To exaggerate the difference in probability between points, you can use a function that grows much faster by changing the macro PDF which is defined within. Make sure the distribution function though is zero where you need it to be (i.e. At points already generated within a triplet so that you do not draw those points again)
- The assumption of p from this->Run(p) being in polar order is quite important in this algorithm. Should that not be true, instead of using index differences in our polynomial distribution, we'd need to instead use the distance between the pixels corresponding to those indicies. This is not a terrible change in terms of code, but is more compuationally complex
The documentation for this class was generated from the following files:
- src/distance/distance.hpp
- src/distance/distance.cpp