Represents the input and expected outputs of a pipeline run. More...
#include <io.hpp>
Public Member Functions | |
| virtual | ~PipelineInput () |
| virtual const Image * | InputImage () const |
| virtual const Catalog & | GetCatalog () const =0 |
| The catalog to which catalog indexes returned from other methods refer. | |
| virtual const Stars * | InputStars () const |
| virtual const StarIdentifiers * | InputStarIds () const |
| The centroid indices in the StarIdentifiers returned from InputStarIds should be indices into InputStars(), not ExpectedStars(), when present, because otherwise it's useless. | |
| virtual const Attitude * | InputAttitude () const |
| Only used in tracking mode, in which case it is an estimate of the current attitude based on the last attitude, IMU info, etc. | |
| virtual const Camera * | InputCamera () const |
| cairo_surface_t * | InputImageSurface () const |
| Convert the InputImage() output into a cairo surface. | |
| virtual const Stars * | ExpectedStars () const |
| virtual const StarIdentifiers * | ExpectedStarIds () const |
| Centroid indices in the StarIdentifiers returned from ExpectedStarIds should be indices into ExpectedStars(), /not/ InputStars(). | |
| virtual const Attitude * | ExpectedAttitude () const |
Detailed Description
Represents the input and expected outputs of a pipeline run.
This is all the data about the pipeline we are about to run that can be gathered without actually running the pipeline. The "input" members return the things that will be fed into the pipeline. The "expected" methods return the "correct" outputs, i.e. what a perfect star tracking algorithm would output (this is only meaningful whe the image is generated, otherwise we don't know the correct output!). The "expected" methods are used to evaluate the quality of our algorithms. Some of the methods (both input and expected) may return NULL for certain subclasses. By default, the "expected" methods return the corresponding inputs, which is reasonable behavior unless you are trying to intentionally introduce error into the inputs.
Constructor & Destructor Documentation
◆ ~PipelineInput()
Member Function Documentation
◆ ExpectedAttitude()

◆ ExpectedStarIds()
|
inlinevirtual |
Centroid indices in the StarIdentifiers returned from ExpectedStarIds should be indices into ExpectedStars(), /not/ InputStars().
This is in contrast to InputStarIds. If you need to compare ExpectedStarIds against the input stars, then you should use some function which uses simple heuristics to match the input stars and expected stars (eg based on distance). Cf how the star-ID comparator works for a reference implementation.
Reimplemented in lost::GeneratedPipelineInput.
Definition at line 117 of file io.hpp.

◆ ExpectedStars()
Reimplemented in lost::GeneratedPipelineInput.
Definition at line 111 of file io.hpp.

◆ GetCatalog()
The catalog to which catalog indexes returned from other methods refer.
Implemented in lost::GeneratedPipelineInput, and lost::PngPipelineInput.
◆ InputAttitude()
Only used in tracking mode, in which case it is an estimate of the current attitude based on the last attitude, IMU info, etc.
Reimplemented in lost::GeneratedPipelineInput.
Definition at line 106 of file io.hpp.


◆ InputCamera()
Reimplemented in lost::GeneratedPipelineInput, and lost::PngPipelineInput.
Definition at line 107 of file io.hpp.

◆ InputImage()
Reimplemented in lost::GeneratedPipelineInput, and lost::PngPipelineInput.
Definition at line 98 of file io.hpp.


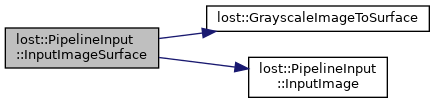
◆ InputImageSurface()
| cairo_surface_t * lost::PipelineInput::InputImageSurface | ( | ) | const |
Convert the InputImage() output into a cairo surface.
Convert the result of InputImage() into a cairo surface.
Allocates a new surface, whih must be destroyed with cairo_surface_destroy
Definition at line 340 of file io.cpp.
◆ InputStarIds()
|
inlinevirtual |
The centroid indices in the StarIdentifiers returned from InputStarIds should be indices into InputStars(), not ExpectedStars(), when present, because otherwise it's useless.
Reimplemented in lost::GeneratedPipelineInput.
Definition at line 104 of file io.hpp.


◆ InputStars()
Reimplemented in lost::GeneratedPipelineInput.
Definition at line 101 of file io.hpp.


The documentation for this class was generated from the following files: