Loading...
Searching...
No Matches
found::LOSTVectorGenerationAlgorithm Class Reference
The LOSTVectorGenerationAlgorithm class houses the a Vector Assembly Algorithm that calculates the position of the satellite using orientation information determined from LOST. More...
#include <vectorize.hpp>
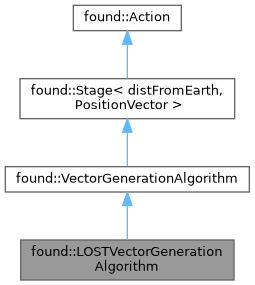
Inheritance diagram for found::LOSTVectorGenerationAlgorithm:
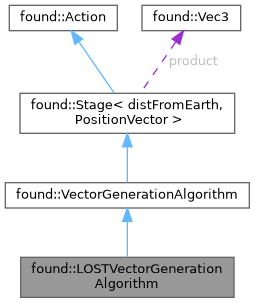
Collaboration diagram for found::LOSTVectorGenerationAlgorithm:
Public Member Functions | |
| LOSTVectorGenerationAlgorithm (Quaternion relativeOrientation, Quaternion referenceOrientation) | |
| Creates a LOSTVectorGenerationAlgorithm object. | |
| LOSTVectorGenerationAlgorithm (Quaternion orientation) | |
| Creates a LOSTVectorGenerationAlgorithm object. | |
| PositionVector | Run (const PositionVector &x_E) override |
| Runs the Vector Assembly Algorithm, which finds the vector of the satellite with respect to Earth's center using information from LOST. | |
 Public Member Functions inherited from found::FunctionStage< PositionVector, PositionVector > Public Member Functions inherited from found::FunctionStage< PositionVector, PositionVector > | |
| FunctionStage ()=default | |
| Constructs a new Stage. | |
| virtual | ~FunctionStage ()=default |
| Destroys this. | |
| void | DoAction () override |
| Executes Run (with a stored input and storing the output) | |
| PositionVector & | GetResource () |
| Returns the stored input of this. | |
| PositionVector *& | GetProduct () |
| Returns the stored output of this. | |
| Public Member Functions inherited from found::Stage< Input, Output > | |
| virtual Output | Run (Input input)=0 |
| Runs this stage. | |
Private Attributes | |
| Quaternion | orientation |
| Complete rotation from camera coordinate definition to equatorial frame. | |
Additional Inherited Members | |
| Protected Attributes inherited from found::FunctionStage< PositionVector, PositionVector > | |
| PositionVector | resource |
| The stored input for this. | |
| PositionVector * | product |
| The pointer to the stored output for this. | |
Detailed Description
The LOSTVectorGenerationAlgorithm class houses the a Vector Assembly Algorithm that calculates the position of the satellite using orientation information determined from LOST.
Constructor & Destructor Documentation
◆ LOSTVectorGenerationAlgorithm() [1/2]
|
inlineexplicit |
Creates a LOSTVectorGenerationAlgorithm object.
- Parameters
-
relativeOrientation The rotation from FOUND camera's reference frame into reference frame L. referenceOrientation The orientation of the equatorial reference frame with respect to a reference frame L.
- Precondition
- relativeOrientation must go from FOUND camera's reference frame → reference frame L and referenceOrientation must go from reference frame L → equatorial reference frame.
- Note
- orientation equals FOUND camera's reference frame → reference frame L → equatorial reference frame
◆ LOSTVectorGenerationAlgorithm() [2/2]
|
inlineexplicit |
Creates a LOSTVectorGenerationAlgorithm object.
- Parameters
-
orientation The orientation of the equaotrial reference frame in terms of the FOUND camera's reference frame.
- Precondition
- orientation must go from FOUND camera's reference frame -> equatorial reference frame.
Member Function Documentation
◆ Run()
|
override |
Runs the Vector Assembly Algorithm, which finds the vector of the satellite with respect to Earth's center using information from LOST.
- Precondition
- This class was initialized by forwards quaternion(s)
- Parameters
-
x_E The distance from Earth
- Returns
- A PositionVector that represents the 3D Vector of the satellite relative to Earth's center
The documentation for this class was generated from the following files:
- src/distance/vectorize.hpp
- src/distance/vectorize.cpp