The "de facto" star-id algorithm used in many real-world missions. More...
#include <star-id.hpp>
Public Member Functions | |
| StarIdentifiers | Go (const unsigned char *database, const Stars &, const Catalog &, const Camera &) const |
| Actualy perform the star idenification. This is the "main" function for StarIdAlgorithm. | |
| PyramidStarIdAlgorithm (decimal tolerance, int numFalseStars, decimal maxMismatchProbability, long cutoff) | |
 Public Member Functions inherited from lost::StarIdAlgorithm Public Member Functions inherited from lost::StarIdAlgorithm | |
| virtual | ~StarIdAlgorithm () |
Detailed Description
The "de facto" star-id algorithm used in many real-world missions.
Pyramid searches through groups of 4 stars in the image. For each one it tries to find a corresponding 4-star pattern in the database. Four stars is enough that pyramid is often able to uniquely match the first 4-star pattern it tries, making it fast and reliable. However, this only holds true if the camera is calibrated and has low centroid error.
Definition at line 52 of file star-id.hpp.
Constructor & Destructor Documentation
◆ PyramidStarIdAlgorithm()
|
inline |
- Parameters
-
tolerance Angular tolerance (Two inter-star distances are considered the same if within this many radians) numFalseStars an estimate of the number of false stars in the whole celestial sphere (not just the field of view). Eg, if you estimate 10 dead pixels in a 40 degree FOV, you'd want to multiply that up to a hundred-something numFalseStars. maxMismatchProbability The maximum allowable probability for any star to be mis-id'd. cutoff Maximum number of pyramids to iterate through before giving up.
Definition at line 63 of file star-id.hpp.
Member Function Documentation
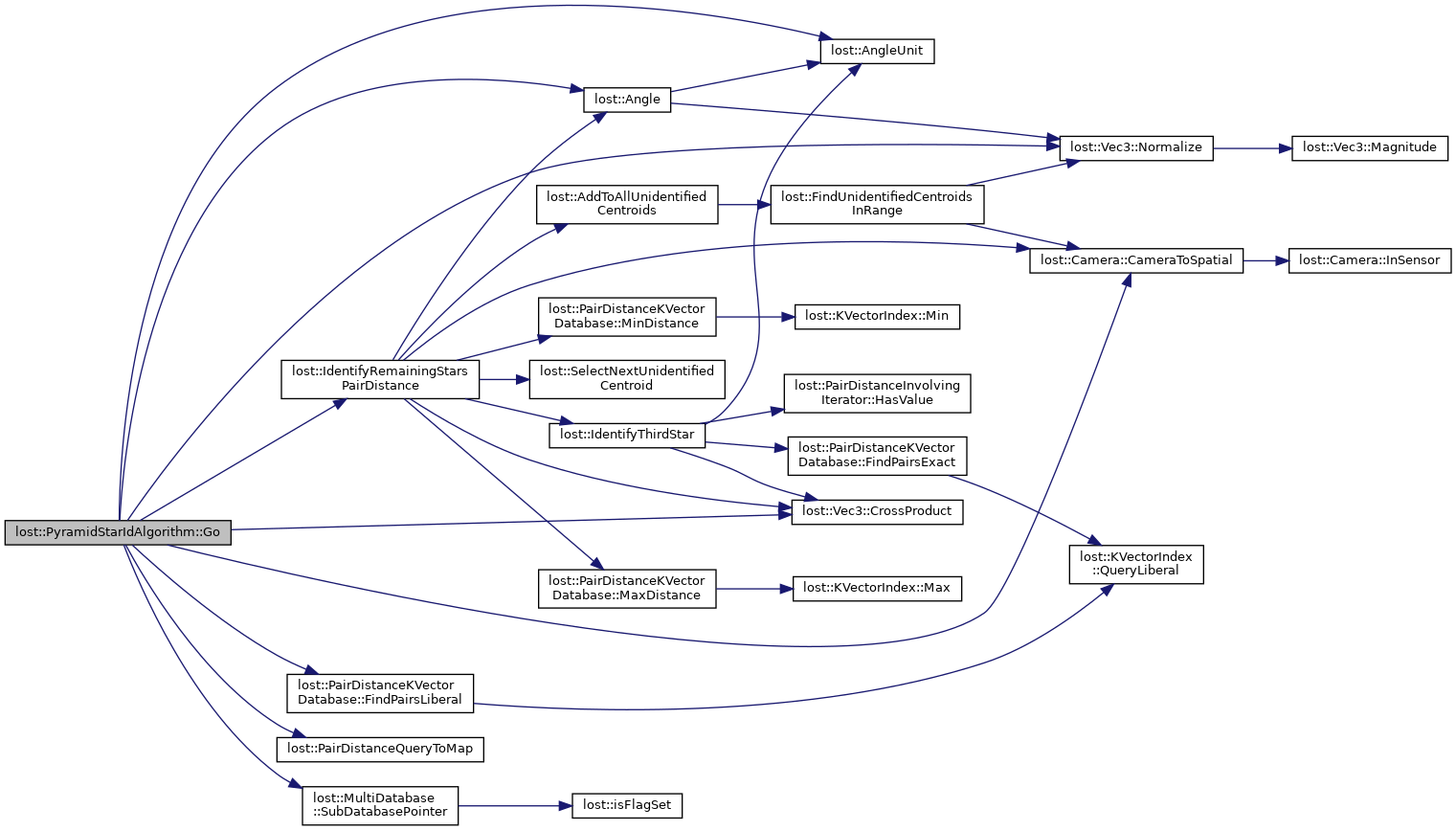
◆ Go()
|
virtual |
Actualy perform the star idenification. This is the "main" function for StarIdAlgorithm.
Implements lost::StarIdAlgorithm.
Definition at line 571 of file star-id.cpp.
The documentation for this class was generated from the following files:
- src/star-id.hpp
- src/star-id.cpp