Loading...
Searching...
No Matches
attitude-utils.cpp File Reference
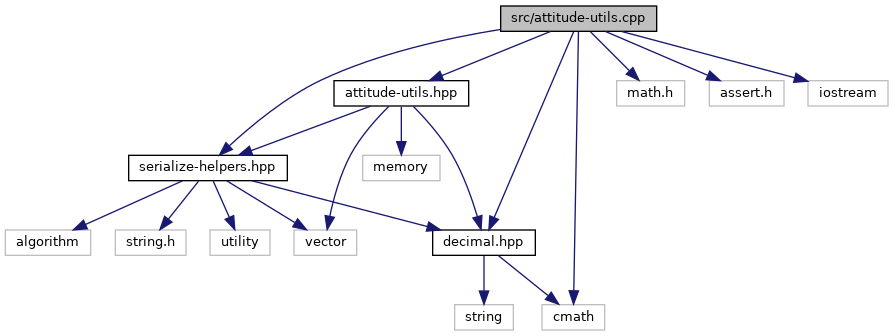
#include "attitude-utils.hpp"#include <math.h>#include <assert.h>#include <cmath>#include <iostream>#include "decimal.hpp"#include "serialize-helpers.hpp"
Include dependency graph for attitude-utils.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | lost |
| LOST starting point. | |
Macros | |
| #define | _MATMUL_ENTRY(row, col) At(row,0)*other.At(0,col) + At(row,1)*other.At(1,col) + At(row,2)*other.At(2,col) |
Functions | |
| Quaternion | lost::SphericalToQuaternion (decimal ra, decimal dec, decimal roll) |
| Return a quaternion that will reorient the coordinate axes so that the x-axis points at the given right ascension and declination, then roll the coordinate axes counterclockwise (i.e., the stars will appear to rotate clockwise). | |
| Vec3 | lost::SphericalToSpatial (decimal ra, decimal de) |
| Convert from right ascension & declination to a 3d point on the unit sphere. | |
| void | lost::SpatialToSpherical (const Vec3 &vec, decimal *ra, decimal *de) |
| Convert from a 3d point on the unit sphere to right ascension & declination. | |
| decimal | lost::RadToDeg (decimal rad) |
| decimal | lost::DegToRad (decimal deg) |
| decimal | lost::RadToArcSec (decimal rad) |
| decimal | lost::ArcSecToRad (decimal arcSec) |
| decimal | lost::DecimalModulo (decimal x, decimal mod) |
| Given a decimal, find it "modulo" another decimal, in the true mathematical sense (not remainder). | |
| Mat3 | lost::QuaternionToDCM (const Quaternion &quat) |
| Convert a quaternion to a rotation matrix (Direction Cosine Matrix) | |
| Quaternion | lost::DCMToQuaternion (const Mat3 &dcm) |
| Convert a rotation matrix (Direction Cosine Matrix) to a quaternion representing the same rotation. | |
| void | lost::SerializeVec3 (SerializeContext *ser, const Vec3 &vec) |
| Serialize a Vec3 to buffer. Takes up space according to SerializeLengthVec3. | |
| Vec3 | lost::DeserializeVec3 (DeserializeContext *des) |
| decimal | lost::Angle (const Vec3 &vec1, const Vec3 &vec2) |
| Calculate the inner angle, in radians, between two vectors. | |
| decimal | lost::AngleUnit (const Vec3 &vec1, const Vec3 &vec2) |
| Calculate the inner angle, in radians, between two /unit/ vectors. | |
Variables | |
| const Mat3 | lost::kIdentityMat3 |
| 3x3 identity matrix | |
Macro Definition Documentation
◆ _MATMUL_ENTRY
| #define _MATMUL_ENTRY | ( | row, | |
| col | |||
| ) | At(row,0)*other.At(0,col) + At(row,1)*other.At(1,col) + At(row,2)*other.At(2,col) |