Loading...
Searching...
No Matches
attitude-utils.hpp File Reference
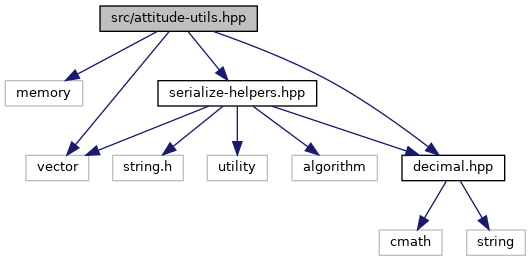
Include dependency graph for attitude-utils.hpp:
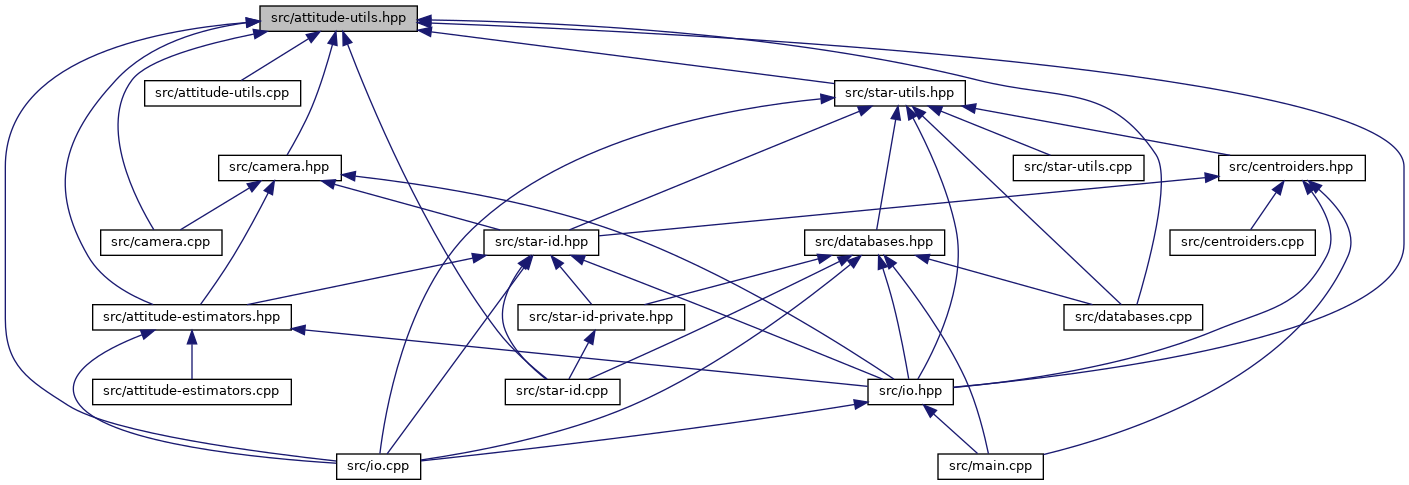
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | lost::Vec2 |
| A two dimensional vector with decimaling point components. More... | |
| class | lost::Vec3 |
| Three dimensional vector with decimaling point components. More... | |
| class | lost::Mat3 |
| 3x3 vector with decimaling point components More... | |
| class | lost::EulerAngles |
| A "human-readable" way to represent a 3d rotation or orientation. More... | |
| class | lost::Quaternion |
| A quaternion is a common way to represent a 3d rotation. More... | |
| class | lost::Attitude |
| The attitude (orientation) of a spacecraft. More... | |
Namespaces | |
| namespace | lost |
| LOST starting point. | |
Functions | |
| void | lost::SerializeVec3 (SerializeContext *ser, const Vec3 &vec) |
| Serialize a Vec3 to buffer. Takes up space according to SerializeLengthVec3. | |
| Vec3 | lost::DeserializeVec3 (DeserializeContext *des) |
| decimal | lost::Distance (const Vec2 &, const Vec2 &) |
| decimal | lost::Distance (const Vec3 &, const Vec3 &) |
| Mat3 | lost::QuaternionToDCM (const Quaternion &quat) |
| Convert a quaternion to a rotation matrix (Direction Cosine Matrix) | |
| Quaternion | lost::DCMToQuaternion (const Mat3 &dcm) |
| Convert a rotation matrix (Direction Cosine Matrix) to a quaternion representing the same rotation. | |
| Quaternion | lost::SphericalToQuaternion (decimal ra, decimal dec, decimal roll) |
| Return a quaternion that will reorient the coordinate axes so that the x-axis points at the given right ascension and declination, then roll the coordinate axes counterclockwise (i.e., the stars will appear to rotate clockwise). | |
| Vec3 | lost::SphericalToSpatial (decimal ra, decimal de) |
| Convert from right ascension & declination to a 3d point on the unit sphere. | |
| void | lost::SpatialToSpherical (const Vec3 &vec, decimal *ra, decimal *de) |
| Convert from a 3d point on the unit sphere to right ascension & declination. | |
| decimal | lost::Angle (const Vec3 &vec1, const Vec3 &vec2) |
| Calculate the inner angle, in radians, between two vectors. | |
| decimal | lost::AngleUnit (const Vec3 &vec1, const Vec3 &vec2) |
| Calculate the inner angle, in radians, between two /unit/ vectors. | |
| decimal | lost::RadToDeg (decimal rad) |
| decimal | lost::DegToRad (decimal deg) |
| decimal | lost::RadToArcSec (decimal rad) |
| decimal | lost::ArcSecToRad (decimal arcSec) |
| decimal | lost::DecimalModulo (decimal x, decimal mod) |
| Given a decimal, find it "modulo" another decimal, in the true mathematical sense (not remainder). | |