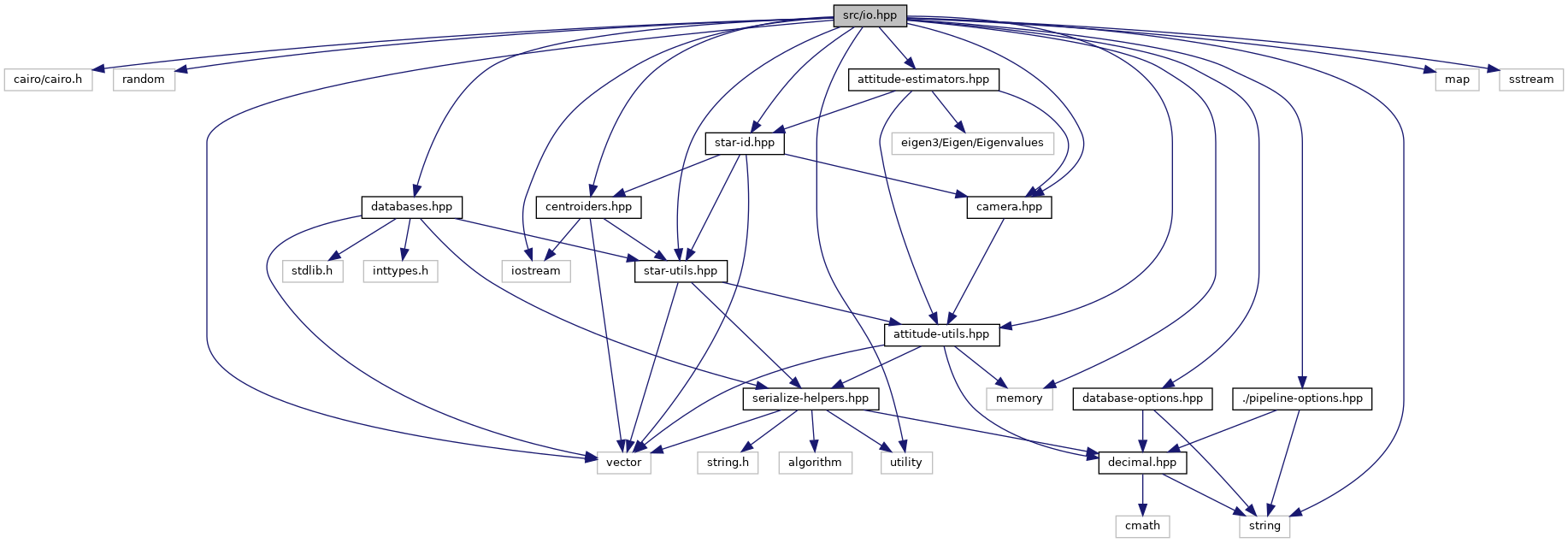
#include <cairo/cairo.h>
#include <random>
#include <vector>
#include <map>
#include <utility>
#include <string>
#include <sstream>
#include <iostream>
#include <memory>
#include "centroiders.hpp"
#include "star-utils.hpp"
#include "star-id.hpp"
#include "camera.hpp"
#include "attitude-utils.hpp"
#include "attitude-estimators.hpp"
#include "databases.hpp"
#include "./pipeline-options.hpp"
#include "database-options.hpp"
Go to the source code of this file.
|
| namespace | lost |
| | LOST starting point.
|
| |
|
| #define | LOST_CLI_OPTION(name, type, prop, defaultVal, converter, defaultArg) type prop = defaultVal; |
| |
| #define | LOST_CLI_OPTION(name, type, prop, defaultVal, converter, defaultArg) type prop = defaultVal; |
| |
|
| const Catalog & | lost::CatalogRead () |
| | Read and parse the full catalog from disk. If called multiple times, will re-use the first result.
|
| |
| unsigned char * | lost::SurfaceToGrayscaleImage (cairo_surface_t *cairoSurface) |
| | Convert a colored Cairo image surface into a row-major array of grayscale pixels.
|
| |
| cairo_surface_t * | lost::GrayscaleImageToSurface (const unsigned char *image, const int width, const int height) |
| |
| PipelineInputList | lost::GetPipelineInput (const PipelineOptions &values) |
| | Come up with a list of pipeline inputs based on command line options.
|
| |
| std::ostream & | lost::operator<< (std::ostream &os, const Camera &camera) |
| | Print information about the camera in machine and human-readable form.
|
| |
| Pipeline | lost::SetPipeline (const PipelineOptions &values) |
| | Create a pipeline from command line options.
|
| |
| void | lost::PipelineComparison (const PipelineInputList &expected, const std::vector< PipelineOutput > &actual, const PipelineOptions &values) |
| | Print or otherwise analyze the results of (perhaps multiple) runs of a star tracking pipeline.
|
| |
| StarIdComparison | lost::StarIdsCompare (const StarIdentifiers &expected, const StarIdentifiers &actual, const Catalog &expectedCatalog, const Catalog &actualCatalog, decimal centroidThreshold, const Stars &expectedStars, const Stars &inputStars) |
| | Compare expected and actual star identifications.
|
| |
| SerializeContext | lost::serFromDbValues (const DatabaseOptions &values) |
| |
| MultiDatabaseDescriptor | lost::GenerateDatabases (const Catalog &, const DatabaseOptions &values) |
| | Appropriately create descriptors for all requested databases according to command-line options.
|
| |
| void | lost::InspectCatalog () |
| |
◆ LOST_CLI_OPTION [1/2]
| #define LOST_CLI_OPTION |
( |
|
name, |
|
|
|
type, |
|
|
|
prop, |
|
|
|
defaultVal, |
|
|
|
converter, |
|
|
|
defaultArg |
|
) |
| type prop = defaultVal; |
◆ LOST_CLI_OPTION [2/2]
| #define LOST_CLI_OPTION |
( |
|
name, |
|
|
|
type, |
|
|
|
prop, |
|
|
|
defaultVal, |
|
|
|
converter, |
|
|
|
defaultArg |
|
) |
| type prop = defaultVal; |