Loading...
Searching...
No Matches
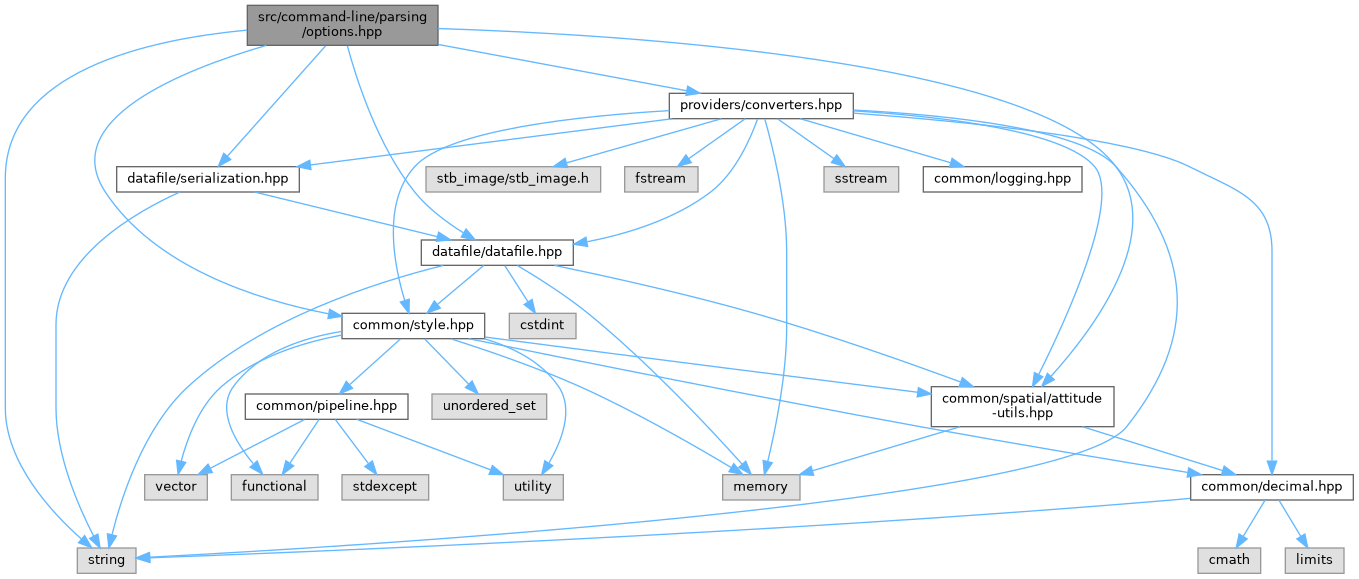
#include <string>#include "common/style.hpp"#include "common/spatial/attitude-utils.hpp"#include "providers/converters.hpp"#include "datafile/datafile.hpp"#include "datafile/serialization.hpp"
Include dependency graph for options.hpp:
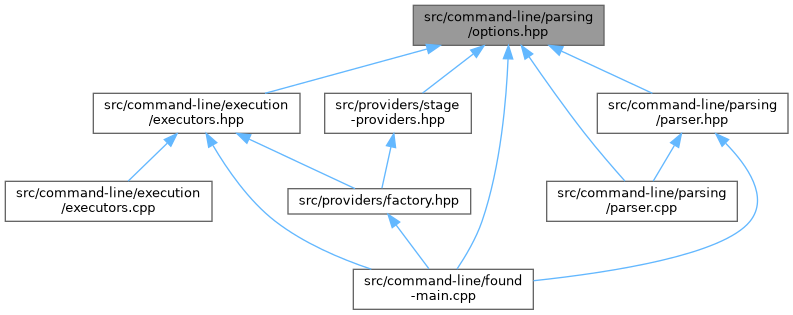
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | CalibrationOptions |
| class | DistanceOptions |
| class | OrbitOptions |
Macros | |
| #define | emptyDFVer 0U |
| Version for an empty/null Data File. | |
| #define | defaultDFHead {{'L','O','S','T'}, emptyDFVer} |
| Header for an empty/null Data File. | |
| #define | CALIBRATION |
| Calibration Flags. | |
| #define | SEDA "SEDA" |
| Distance Algorithms. | |
| #define | SDDA "SDDA" |
| #define | ISDDA "ISDDA" |
| #define | DISTANCE |
| Distance Flags. | |
| #define | ORBIT |
| #define | FOUND_CLI_OPTION(name, type, prop, defaultVal, converter, defaultArg, ASSIGN, doc) type prop = defaultVal; |
| #define | FOUND_CLI_OPTION(name, type, prop, defaultVal, converter, defaultArg, ASSIGN, doc) type prop = defaultVal; |
| #define | FOUND_CLI_OPTION(name, type, prop, defaultVal, converter, defaultArg, ASSIGN, doc) type prop = defaultVal; |
Macro Definition Documentation
◆ CALIBRATION
| #define CALIBRATION |
Value:
FOUND_CLI_OPTION("local-orientation" , found::EulerAngles, lclOrientation , found::EulerAngles(0, 0, 0), found::strtoea(optarg) , kNoDefaultArgument, REQ_ASSIGN, "The local orientation (deg)" ) \
FOUND_CLI_OPTION("reference-orientation", found::EulerAngles, refOrientation , found::EulerAngles(0, 0, 0), found::strtoea(optarg) , kNoDefaultArgument, REQ_ASSIGN, "The reference orientation (deg)") \
FOUND_CLI_OPTION("output-file" , std::string , outputFile , "" , optarg , kNoDefaultArgument, REQ_ASSIGN, "The output file (*.found)" )
An EulerAngle is a mutable Object representing Euler Angles of a 3D point.
Definition attitude-utils.hpp:165
EulerAngles strtoea(const std::string &str)
Converts a string to euler angles.
Definition converters.hpp:71
#define FOUND_CLI_OPTION(name, type, prop, defaultVal, converter, defaultArg, ASSIGN, doc)
Definition options.hpp:83
#define REQ_ASSIGN(options, prop, value, default)
Assigns a flag with a required value.
Definition parser.cpp:40
Calibration Flags.
◆ defaultDFHead
| #define defaultDFHead {{'L','O','S','T'}, emptyDFVer} |
Header for an empty/null Data File.
◆ DISTANCE
| #define DISTANCE |
Value:
FOUND_CLI_OPTION("image" , found::Image , image , {} , found::strtoimage(optarg) , kNoDefaultArgument, REQ_ASSIGN, "The image to process (JPG, PNG, TGA, BMP, PSD, GIF, HDR, PIC)") \
FOUND_CLI_OPTION("calibration-data" , found::DataFile , calibrationData , {defaultDFHead} , found::strtodf(optarg) , kNoDefaultArgument, REQ_ASSIGN, "The calibration data (*.found)" ) \
FOUND_CLI_OPTION("reference-as-orientation", bool , refAsOrientation, false , found::strtobool(optarg) , true , OPT_ASSIGN, "Use reference-orientation as the orientation of the camera" ) \
FOUND_CLI_OPTION("camera-focal-length" , decimal , focalLength , 0.012 , found::strtodecimal(optarg), kNoDefaultArgument, REQ_ASSIGN, "The camera focal length (m)" ) \
FOUND_CLI_OPTION("camera-pixel-size" , decimal , pixelSize , 20E-6 , found::strtodecimal(optarg), kNoDefaultArgument, REQ_ASSIGN, "The camera pixel size (m)" ) \
FOUND_CLI_OPTION("reference-orientation" , found::EulerAngles, refOrientation , found::EulerAngles(0, 0, 0), found::strtoea(optarg) , kNoDefaultArgument, REQ_ASSIGN, "The reference orientation (deg)" ) \
FOUND_CLI_OPTION("relative-orientation" , found::EulerAngles, relOrientation , found::EulerAngles(0, 0, 0), found::strtoea(optarg) , kNoDefaultArgument, REQ_ASSIGN, "The relative orientation to use (if no calibration) (deg)" ) \
FOUND_CLI_OPTION("planetary-radius" , decimal , radius , DECIMAL_M_R_E , found::strtodecimal(optarg), kNoDefaultArgument, REQ_ASSIGN, "The planetary radius to use (m)" ) \
FOUND_CLI_OPTION("seda-threshold" , unsigned char , SEDAThreshold , 25 , found::strtouc(optarg) , kNoDefaultArgument, REQ_ASSIGN, "Threshold for the SEDA Algorithm ([0,255])" ) \
FOUND_CLI_OPTION("seda-border-len" , int , SEDABorderLen , 1 , atoi(optarg) , kNoDefaultArgument, REQ_ASSIGN, "The border thickness for SEDA (pixels)" ) \
FOUND_CLI_OPTION("seda-offset" , decimal , SEDAOffset , 0.0 , found::strtodecimal(optarg), kNoDefaultArgument, REQ_ASSIGN, "The edge offset for SEDA (pixels)" ) \
FOUND_CLI_OPTION("distance-algo" , std::string , distanceAlgo , SDDA , optarg , kNoDefaultArgument, REQ_ASSIGN, "The distance algorithm to use (SDDA or ISDDA)" ) \
FOUND_CLI_OPTION("isdda-min-iterations" , size_t , ISDDAMinIters , 0 , found::strtosize(optarg) , kNoDefaultArgument, REQ_ASSIGN, "The number of iterations for ISDDA" ) \
FOUND_CLI_OPTION("isdda-dist-ratio" , decimal , ISDDADistRatio , DECIMAL_INF , found::strtodecimal(optarg), kNoDefaultArgument, REQ_ASSIGN, "The distance ratio for calculated positions for ISDDA (m)" ) \
FOUND_CLI_OPTION("isdda-discrim-ratio" , decimal , ISDDADiscimRatio, DECIMAL_INF , found::strtodecimal(optarg), kNoDefaultArgument, REQ_ASSIGN, "The loss discrimination ratio for ISSDA" ) \
FOUND_CLI_OPTION("isdda-pdf-order" , int , ISDDAPdfOrd , 2 , atoi(optarg) , kNoDefaultArgument, REQ_ASSIGN, "The Probability Density Function Order for ISSDA (even int)" ) \
FOUND_CLI_OPTION("isdda-radius-loss-order" , int , ISDDARadLossOrd , 4 , atoi(optarg) , kNoDefaultArgument, REQ_ASSIGN, "The Radius Loss Order ISSDA (even int)" ) \
FOUND_CLI_OPTION("output-file" , std::string , outputFile , "" , optarg , kNoDefaultArgument, REQ_ASSIGN, "The output file (*.found)" ) \
Image strtoimage(const std::string &str)
Converts a string to an image.
Definition converters.hpp:115
decimal strtodecimal(const std::string &str)
Converts a string to a decimal.
Definition converters.hpp:56
unsigned char strtouc(const std::string &str)
Converts a string to an unsigned char.
Definition converters.hpp:38
bool strtobool(const std::string &str)
Converts the string to a bool.
Definition converters.hpp:100
#define OPT_ASSIGN(options, prop, value, default)
Assigns a flag with an optional value.
Definition parser.cpp:53
Distance Flags.
◆ emptyDFVer
| #define emptyDFVer 0U |
Version for an empty/null Data File.
◆ FOUND_CLI_OPTION [1/3]
| #define FOUND_CLI_OPTION | ( | name, | |
| type, | |||
| prop, | |||
| defaultVal, | |||
| converter, | |||
| defaultArg, | |||
| ASSIGN, | |||
| doc | |||
| ) | type prop = defaultVal; |
◆ FOUND_CLI_OPTION [2/3]
| #define FOUND_CLI_OPTION | ( | name, | |
| type, | |||
| prop, | |||
| defaultVal, | |||
| converter, | |||
| defaultArg, | |||
| ASSIGN, | |||
| doc | |||
| ) | type prop = defaultVal; |
◆ FOUND_CLI_OPTION [3/3]
| #define FOUND_CLI_OPTION | ( | name, | |
| type, | |||
| prop, | |||
| defaultVal, | |||
| converter, | |||
| defaultArg, | |||
| ASSIGN, | |||
| doc | |||
| ) | type prop = defaultVal; |
◆ ISDDA
| #define ISDDA "ISDDA" |
◆ ORBIT
| #define ORBIT |
Value:
FOUND_CLI_OPTION("position-data", found::LocationRecords, positionData, {} , found::strtolr(optarg) , kNoDefaultArgument, REQ_ASSIGN, "The position data (*.found)" ) \
FOUND_CLI_OPTION("output-form" , std::string , output , "" , optarg , kNoDefaultArgument, REQ_ASSIGN, "The desired form of the output" ) \
FOUND_CLI_OPTION("total-time" , decimal , totalTime , 3600.0 , found::strtodecimal(optarg), kNoDefaultArgument, REQ_ASSIGN, "The total time to predict for (s)" ) \
FOUND_CLI_OPTION("time-step" , decimal , dt , 0.01 , found::strtodecimal(optarg), kNoDefaultArgument, REQ_ASSIGN, "The time step to use (s)" ) \
FOUND_CLI_OPTION("radius" , decimal , radius , DECIMAL_M_R_E, found::strtodecimal(optarg), kNoDefaultArgument, REQ_ASSIGN, "The planetary radius to use (m)" ) \
FOUND_CLI_OPTION("mu" , decimal , mu , 398600.4418 , found::strtodecimal(optarg), kNoDefaultArgument, REQ_ASSIGN, "The standard gravitational parameter (m^3/s^2)")
LocationRecords strtolr(const std::string &str)
Converts a string to a vector of location records.
Definition converters.hpp:143
std::vector< LocationRecord > LocationRecords
A collection of Location Records.
Definition style.hpp:105
◆ SDDA
| #define SDDA "SDDA" |
◆ SEDA
| #define SEDA "SEDA" |
Distance Algorithms.